School Projects
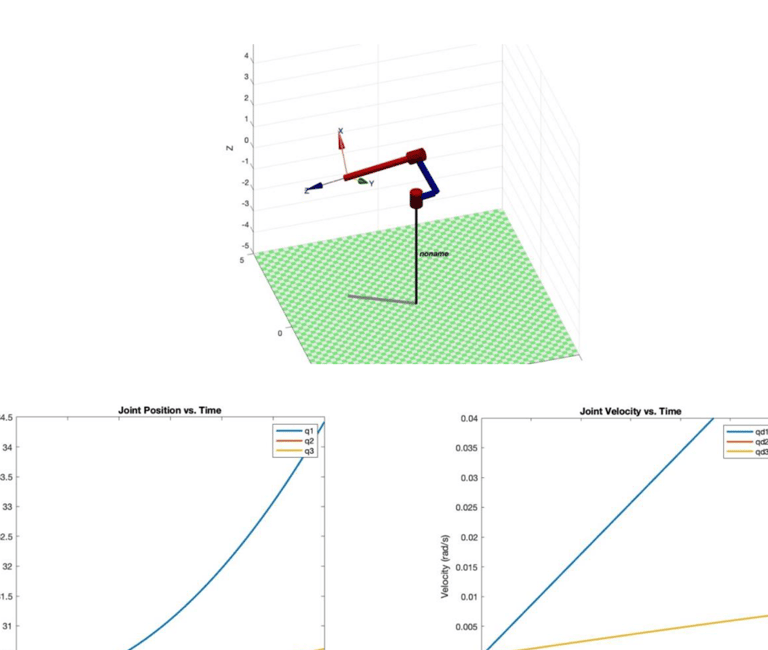
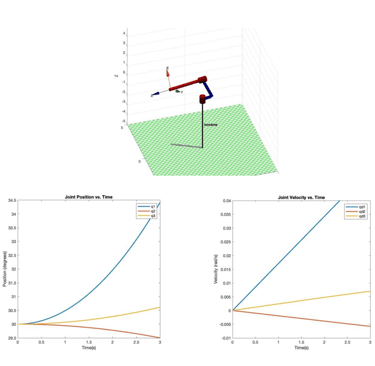
Arm Manipulator App
Helped design an app in MATLAB for computing robot arm parameters for any robot arm design for a modeling and control of robotics class. The app computes: Forward Dynamics, Inverse Kinematics, Compliance Control, and Impedance Control.
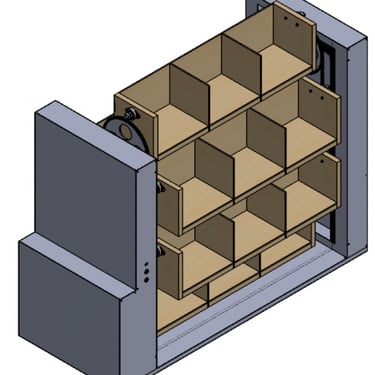
Culminating event for undergraduate mechanical engineering over the course of two semesters. Asked to pick a problem and implement a solution. Choose to address the problem of easy to access storage. Implemented the solution of a rotating storage system meant to allow easy access to large tote boxes.
Capstone Project

Undergraduate Thesis
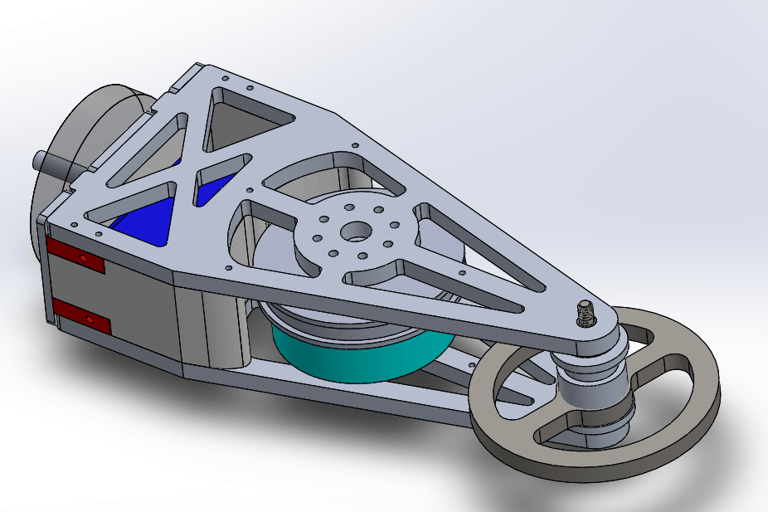
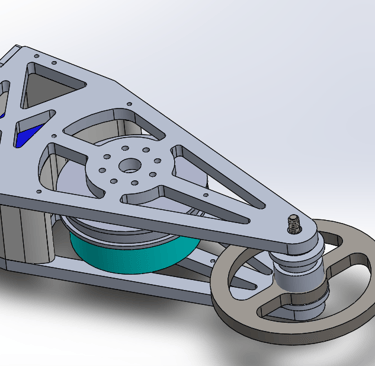
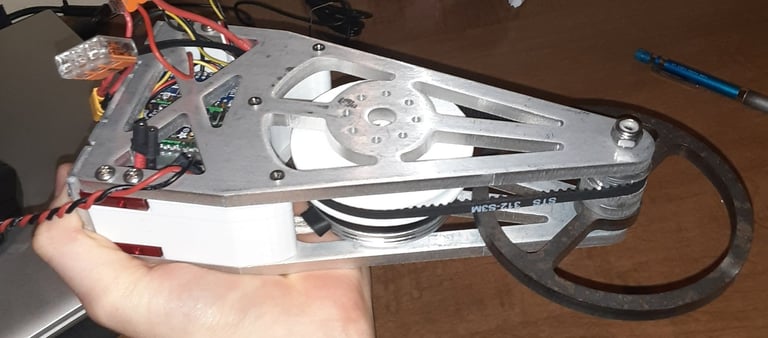

Undergraduate thesis was on creating a robot that could move translationally in any direction by accelerating and decelerating a near horizontal flywheel through the use of conservation of angular momentum and gyroscopic precession.