Experience
Research Assistant, Robotic Actuators and Dynamics Lab, ASU (June 2024-December 2024)
Soft robotics research work. Designed and fabricated a soft robotic manipulator, shape morphing ROV frame, and 5 DOF cable driven arm.
Soft Compliant Hand
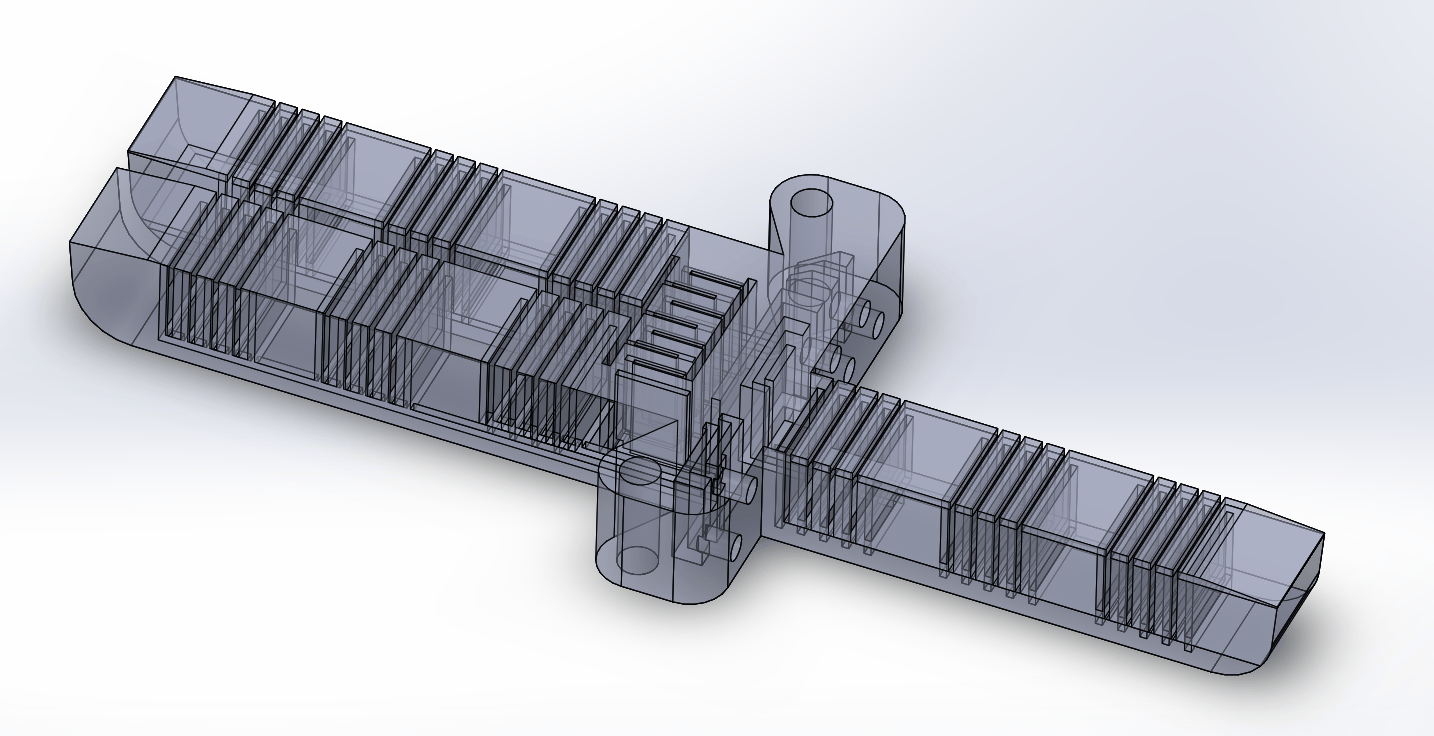
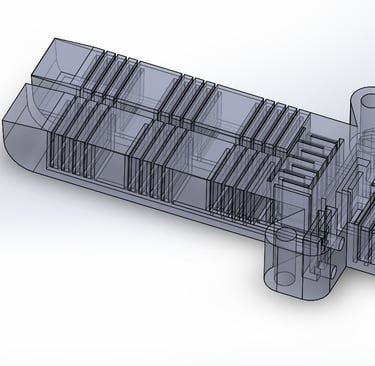
Three finger, underactuated, 7 Degree of Freedom (DOF) soft robotic hand. Printed as one piece on a 3D printer and actuated with air via embedded chambers.
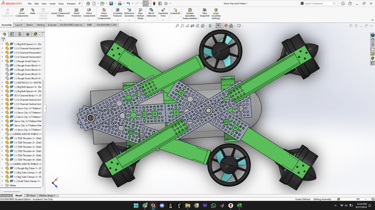
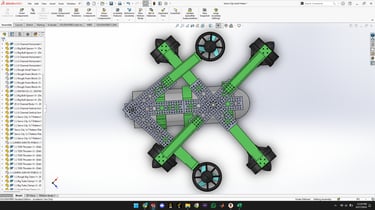
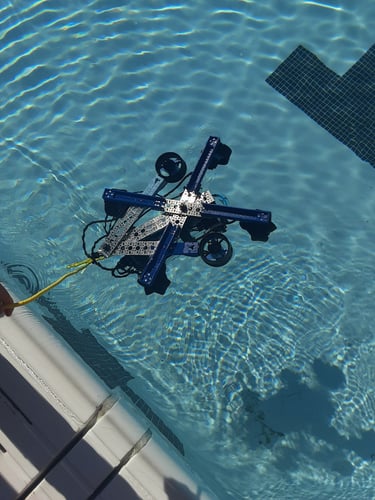
Shape Morphing ROV Frame
ROV frame that was able to change its shape to fit through obstacles

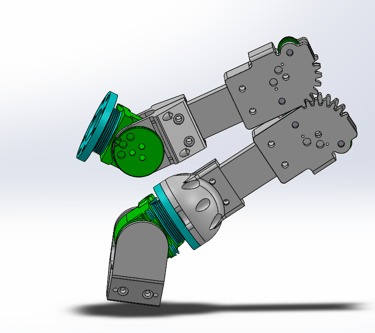
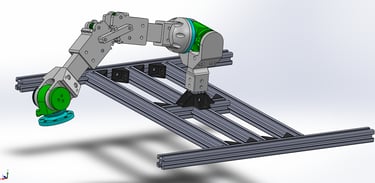
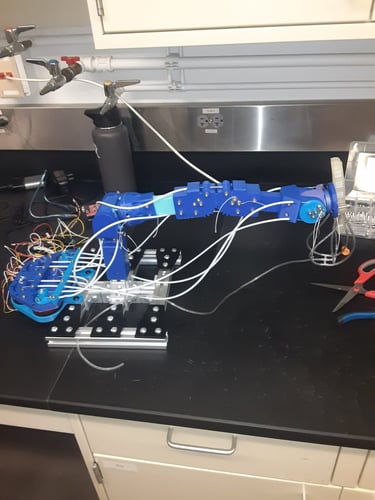
5 DOF Cable Driven Arm
A fully 3D printed 5 Degree of Freedom robotic arm with Bowden Tubes to transmit torque. 450mm max reach, 1kg max payload, and 400g effective mass.