Outside The Classroom
Robot Combat: Team Terrifying Robotics
Wejendary v1
Description: 1lb combat robot designed for high-speed mobility and durability. Key features included a reinforced titanium wedge and brushed 4 motor drive system.
Challenges: Gearboxes on motors proved to be too fragile and broke multiple times.
Lessons: First combat robot I built. Learned about material science, mechanics, and electronics.
Performance: Won its first event, going 7-1 at Arizona Robotic Combat (ARC) 2021. Later beat a 3lb robot at Sun Devil Smackdown (SDSD) 2022.

Wejendary v2
Upgrades: Improved gearbox durability and pushing power.
Challenges: Switched from brushed drive to brushless. Added 1.5lbs of magnetic downforce, allowing the bot to drive vertically. Made the design on CAD. Broke the power switch the night before the competition and was forced to make a new chassis to fit an older one.
Lessons: Rushed chassis was too flimsy. Magnets caused the foam wheels to compress, making it immobile.
Performance: Went 5-2 at ARC 2023 and taking second. Did not lose a single gearbox, proving the changes from v1 worked.
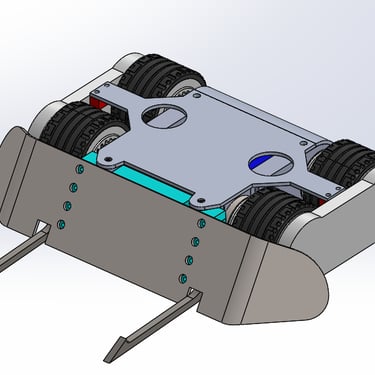

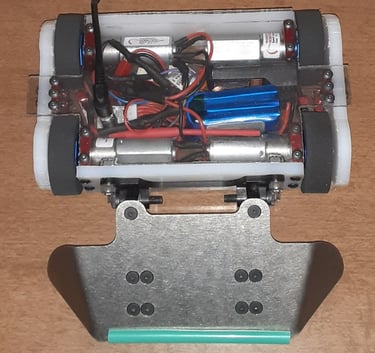
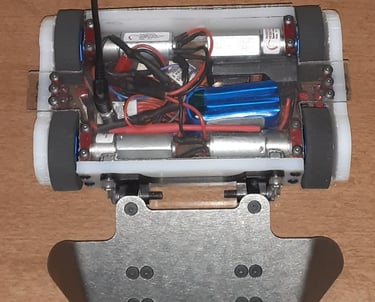
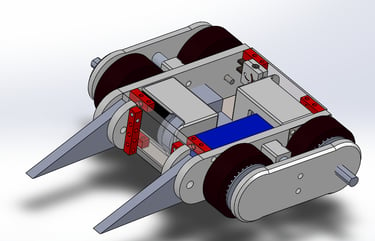
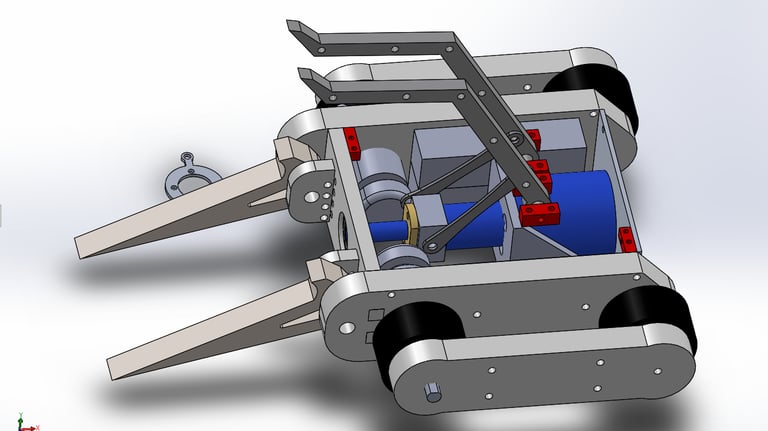
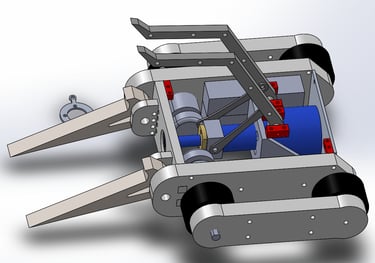
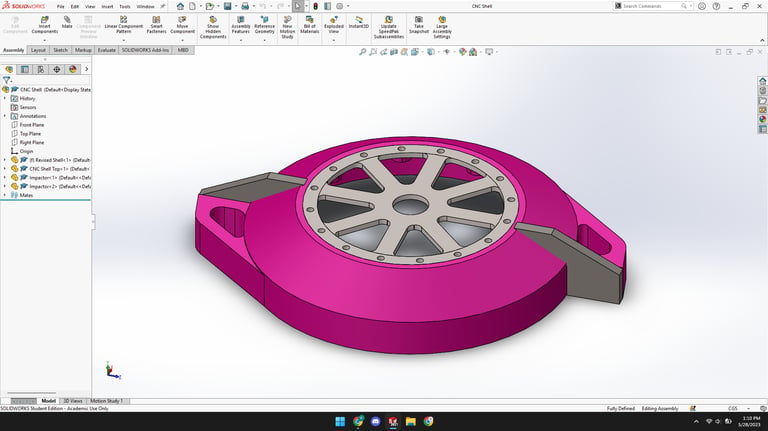
Wejendary v3
Upgrades: Improved chassis durability and overall frame stiffness for more pushing power.
Challenges: Switched to a lighter brushless drive for more weight. Changed foam wheels to stiff rubber. Swapped chassis material from lexan to 6061 Al. Increased magnetic downforce from 1.5lbs to 4, allowing the bot to drive vertically and inverted.
Lessons: Top magnets for self righting were mounted too weakly and broke off. Back armor did not protect vulnerable pulleys.
Performance: It fought 3lb bots, going 2-0 at SDSD 2024 and 4-1 at SDSD 2025, taking third. It went 5-2 at ARC 2024, taking second. Two of its three losses were due to driver error and the other was due to a fatigued connector. The bot took no damage.
Wrath v1
Description: 3lb combat robot designed around spinning its armor, allowing for a big weapon and thick armor. Weapon stored 1.5kJ of energy at 160mph tip speed.
Challenges: Kept the whole robot under 1" tall. Designed a custom hub motor for the weapon.
Lessons: Weapon bearings were press fit and slipped out of the weapon, causing the weapon to fall against the top of the robot and fail.
Performance: It went 2-1 at SDSD 2022.

Wrath v2
Upgrades: Improved the weapon motor by getting CNC'd parts and weapon system by using thicker rings. Lighter chassis for the upgraded weapon system. Entire robot is smaller than v1 in every dimension.
Challenges: Learning curve for a proper CNC hub motor and tolerances.
Lessons: Tolerances from 3rd party manufacturers need to be spot on otherwise the motor will rub.


Warpath v1
Description: 150g combat robot intentionally designed with thick foam armor and being too big for other robots to fight it. To the best of my knowledge, it is the biggest 150g robot ever built (4" x 4" x 14").
Challenges: Keeping the robot under the weight limit while having it be 20x the volume of a normal robot in its weight class.
Lessons: In the 150g weight class, foam is an effective armor. Also took away the idea that spending more on a robot does not necessarily equal a better robot.
Performance: It went 5-2 at ARC 2023, taking 2nd.


Warpath v2
Upgrades: Improved the robot by adding more foam and making it larger. Wanted to test how well foam forks performed.
Challenges: Keeping the wheels rigidly secure to soft foam.
Lessons: How I mounted the wheels to the motor shafts proved to be too fragile, with wheels falling off in my matches. I also learned that in order to be competitive, I would need more pushing power.
Performance: Ended up going 1-2 at ARC 2024 in the main bracket. Once eliminated from the tournament, it joined 2 other 150g bots in the 1lb weight class, where they collectively went 3-0.



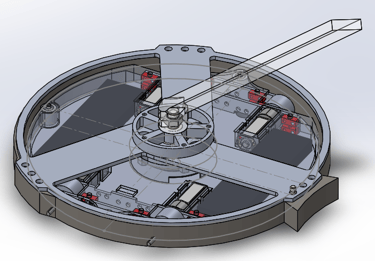
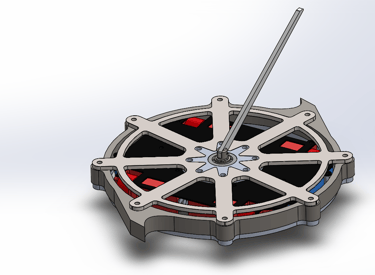
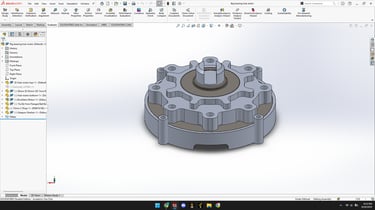
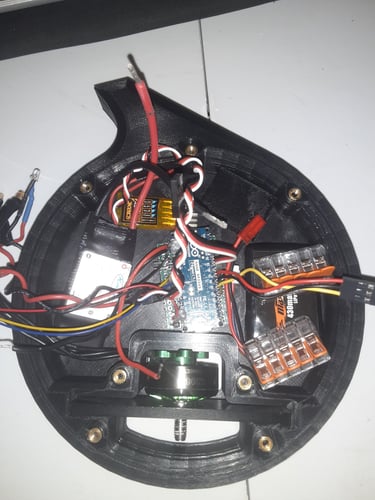
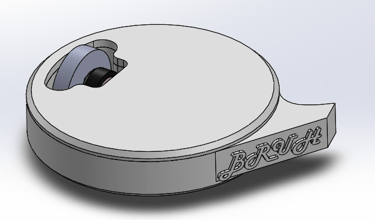
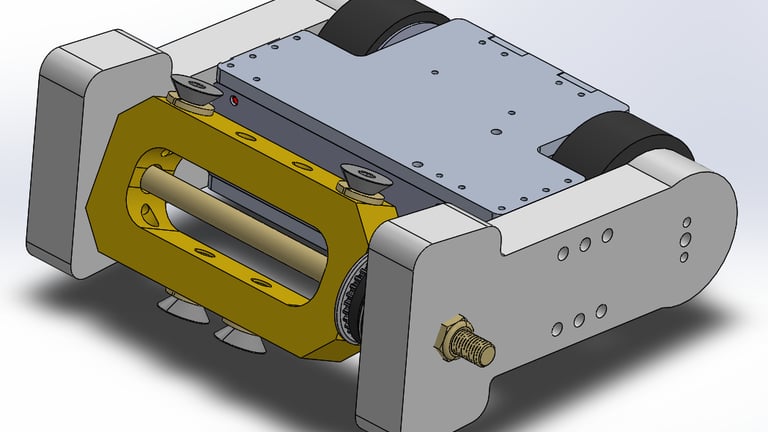
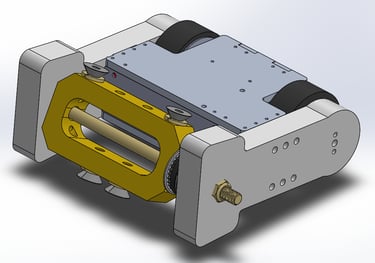
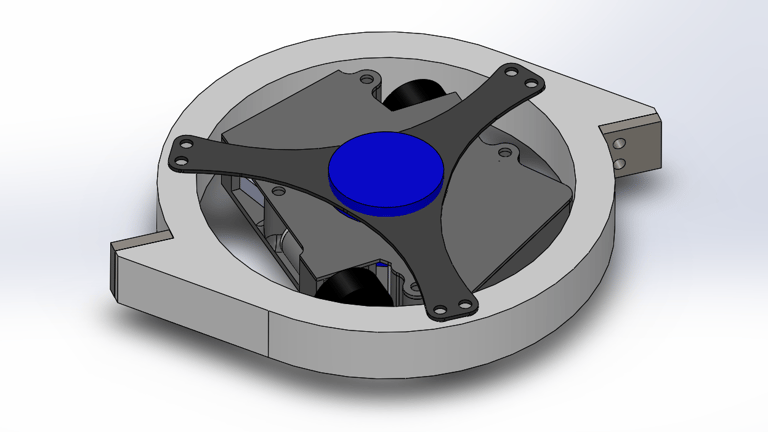
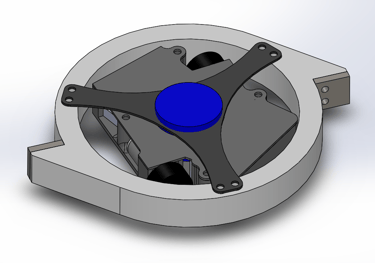
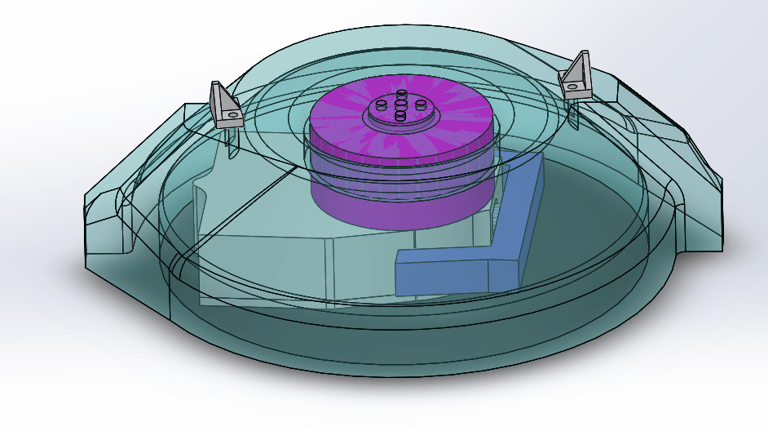
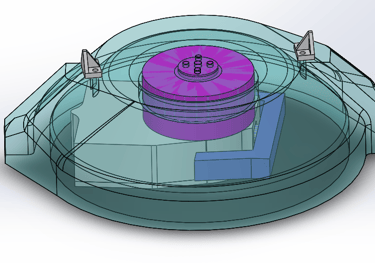
Whirlpool
Description: A 1lb combat robot designed around spinning its entire weight, using an onboard computer and sensors to move. An LED shows 'forward'.
Challenges: Making sure the wheels do not deform due to centripetal acceleration at high speeds. Creation and integration of code.
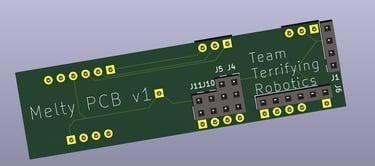
Lessons: Learned how to code in C++, learned about electronics, learned circuit design in KiCad and implemented this knowledge in a PCB. Several wheels were tested to over 10,000 rpm and >1000 g to make sure they did not explode when in combat.
Performance: After several iterations of test chassis' and electronic revisions, it went to ARC 2023 and went 0-2. I was unable to dial in the tuning before the competition, leading it to spin in place rather than spin and move. The bot took no damage.


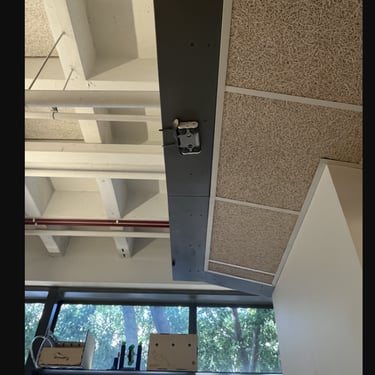
Demonstrating the vertical climbing ability.
Functional spin up test of Wraths weapon.
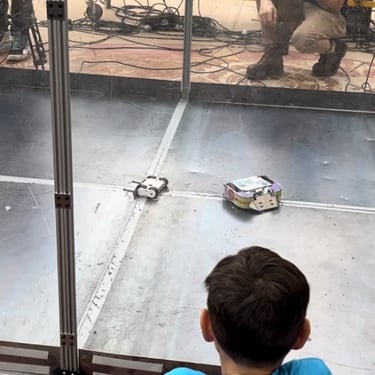
Demonstrating the robot knows its orientation in real time.
Demonstrating the robot is able to translate while spinning.
Wejendary v3 Climbing Test
Abominable
3lb eggbeater designed with durability and reliability in mind. Kept wheels inside the weapon frame rails.
Blastoff
3lb launcher with a massive motor attached to a linear screw. Aimed to launch other bots 4ft off the ground.
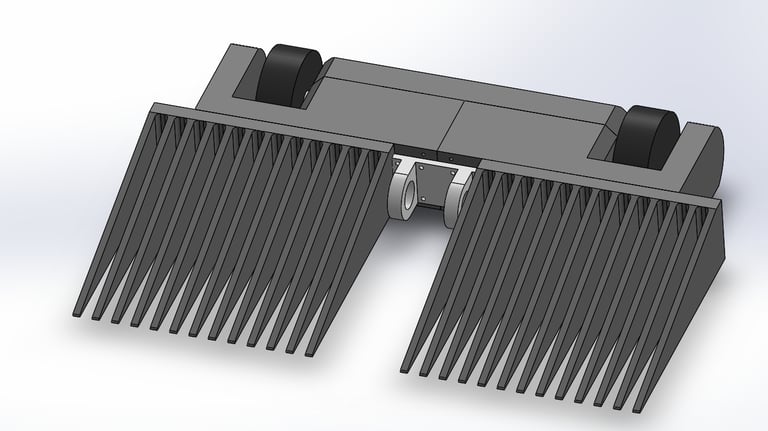
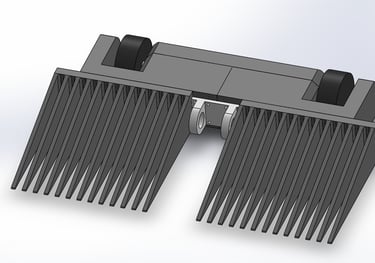
Mane-iac
3lb forky control bot. Designed to be large, fully compliant, and entirely 3D printed out of TPU.
Other Combat Robots Designed and Built but Have Yet to See Combat
Onslaught
150g shell spinner designed to test 2WD stability with off centered wheels.
Fury
1.5lb gyro shell spinner designed around testing if locomotion can be achieved as a shell with gyro.
Carnage
4.5lb shuffler shell spinner designed around spinning a massive CNC'd, 2.25lb steel shell.
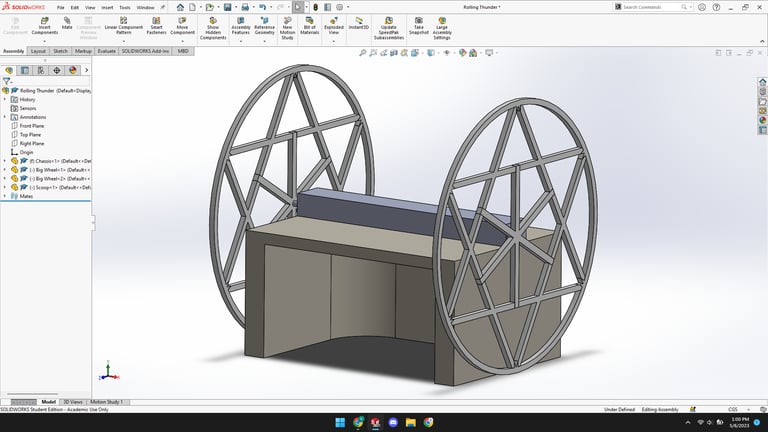
Rolling Thunder
1lb control bot designed to scoop up other robots and push them around while being tall enough to protects its electronics.
Rampage
1lb compliant wedge designed to fight in 3lb tournaments and be tough to destroy.


Melty Spinner
1.5lb melty brain designed to move by spinning a horizontal flywheel.